1.1 Overview:
We were joining a summer exchange student program in ubiquitous computing, which is held by MPI and UCLA. We were used LEGO® MINDSTORMS® EV3 to be an Explorer Robot. Firstly, a program written in C# are used to controlling the motor, color sensor for vehicle movement, we were using the mobile camera via the Android App to automatically capture the real-time video and upload to web server, user via the website to monitor the road’s situation and control the robot. Secondly, instability encountered so many problems in our work, for example, hardware and instability of connection, etc. Finally, we could find out the solution and robot was following the instruction to visit the destination, when it arrived, it will transfer the real-time video upload to the website via the web server. User also used the robot to know the road’s situation.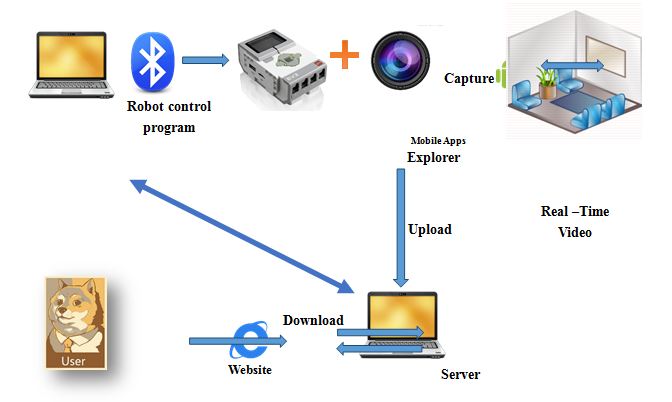
1.2 Tools:
- Programming language: C#, Java, JavaScript, Python
- SDK: Microsoft Visual Studio, Android Studio
- Device: LEGO® MINDSTORMS® EV3
2.1 LEGO® MINDSTORMS® Robot’s Usage:
Lego Minsdstorm is easily one of the most interesting toys out on the market today. In This robot, we can create a fully functional robot that can accept any task your design in a program. As a result, we should use this robot to be a remote control explorer.2.2 LEGO® MINDSTORMS® Robot’s control panel:
This website is a control panel of the robot written in JavaScript. It connected to the server http://emo.sorz.org/lego/ to capture the camera and get the control robot instruction. As a result, we can use the website to control the robot.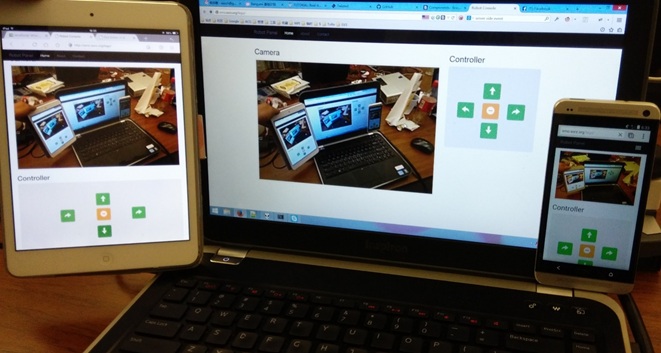

2.3 Robot’ Remote control demo:
Remote control website: http://emo.sorz.org/lego/Remote Robot demo video: https://www.youtube.com/watch?v=nyTFDg2Xt80&feature=youtu.be/
During this week, we have already finished our research in ubiquitous computing. In this period of time, we encountered so many problems in our work, such as interference, Robot action instability and cannot install the wireless camera in the robot, etc. We also applied our knowledge regarding the implementation of the robot such as the robot was following the instruction to visit the destination. Moreover, this project useful for understanding robot and we learnt how to build a program via Bluetooth to remote control the robot. In addition, we also got improved our team work and self- discipline, etc. Besides this, we were also traveling several places in Los Angeles. In conclusion, it is a priceless experience.